An agile multi-body additively manufactured soft actuator for soft manipulators
DOI:
https://doi.org/10.29105/ingenierias23.89-4Palabras clave:
Materiales blandos, fabricación aditiva, robots blandos, istema de controlResumen
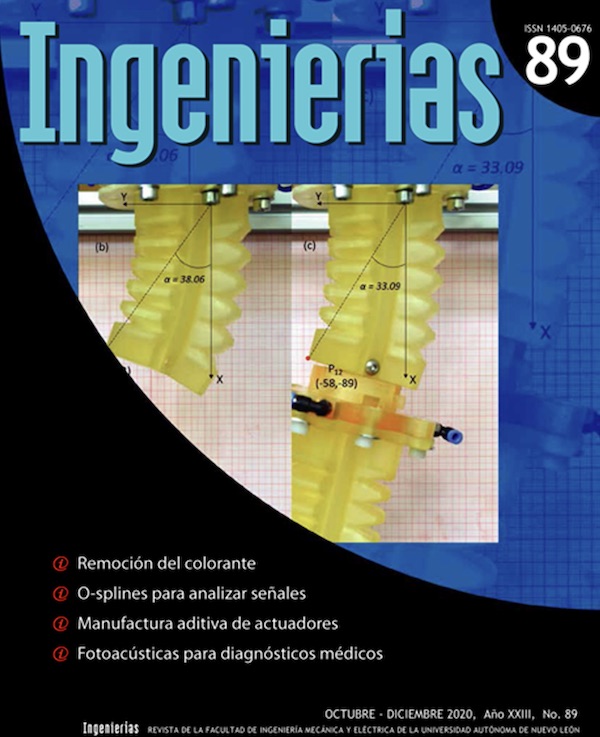
Con la introducción de robots colaborativos en entornos de producción, el daño a los trabajadores por el uso de robots tradicionales con enlaces rígidos es inherente. Se ha propuesto una nueva generación de robots hechos de materiales blandos flexibles que reduce el peligro de colisión mediante acciones de autodeformación como una solución prometedora para los entornos de colaboración humano-robot. Recientemente, con el desarrollo de la fabricación aditiva de materiales blandos elásticos, surgen nuevas oportunidades de diseño para estos llamados robots blandos. Sin embargo, aún no se logra la robustez que se requiere para los entornos de producción. Este documento presenta un enfoque de diseño de un actuador neumático blando de tres ejes fabricado de forma totalmente aditiva. Para su uso en sistemas de manipuladores robóticos blandos flexibles, se presentan pautas de diseño, un proceso de impresión 3D directo con materiales elásticos y un sistema de control de regulación de presión semiautomatizado PLC de bajo nivel. Para validar el diseño propuesto, el actuador se fabrica y prueba para la fuerza de contacto máxima, la reacción de movimiento de flexión y su respuesta de señal.
Descargas
Citas
K. Suzumori, “Development of Flexible Microactuator and Its Applications to Robotic M.” .
C. Schumacher, B. Bickel, J. Rys, S. Marschner, C. Daraio, and M. Gross, “Microstructures to control elasticity in 3D printing,” ACM Trans. Graph., vol. 34, no. 4, pp. 136:1-136:13, 2015, doi: 10.1145/2766926. DOI: https://doi.org/10.1145/2766926
B. T. Phillips et al., “A Dexterous, Glove-Based Teleoperable Low-Power Soft Robotic Arm for Delicate Deep-Sea Biological Exploration,” Sci. Rep., vol. 8, no. 1, pp. 1–9, 2018, doi: 10.1038/s41598-018-33138-y. DOI: https://doi.org/10.1038/s41598-018-33138-y
I.DeFalco,M.Cianchetti,andA.Menciassi,“Stiff-flopsurgicalmanipulator:design and preliminary motion evalutaion,” 4th Jt. Work. New Technol. Comput. Assist. Surg., no. October 2014, pp. 131–134, 2014, doi: 10.13140/RG.2.1.3972.9124.
M.Hamad,N.Mansfeld,S.Abdolshah,andS.Haddadin,“TheRoleofRobot Payload in the Safety Map Framework,” IEEE Int. Conf. Intell. Robot. Syst., pp. 195–200, 2019, doi: 10.1109/IROS40897.2019.8968022. DOI: https://doi.org/10.1109/IROS40897.2019.8968022
O. D. Yirmibeşoğlu, T. Oshiro, G. Olson, C. Palmer, and Y. Mengüç, “Evaluation of 3D printed soft robots in radiation environments and comparison with molded counterparts,” Front. Robot. AI, vol. 6, no. MAY, pp. 1–14, 2019, doi: 10.3389/frobt.2019.00040. DOI: https://doi.org/10.3389/frobt.2019.00040
O. D. Yirmibesoglu et al., “Direct 3D printing of silicone elastomer soft robots and their performance comparison with molded counterparts,” 2018 IEEE Int. Conf. Soft Robot. RoboSoft 2018, pp. 295–302, 2018, doi: 10.1109/ ROBOSOFT.2018.8404935. DOI: https://doi.org/10.1109/ROBOSOFT.2018.8404935
I. De Falco, G. Gerboni, M. Cianchetti, and A. Menciassi, “Design and Fabrication of an Elastomeric Unit for Soft Modular Robots in Minimally Invasive Surgery,” J. Vis. Exp., no. 105, pp. 1–9, 2015, doi: 10.3791/53118. DOI: https://doi.org/10.3791/53118
T. Ranzani, M. Cianchetti, G. Gerboni, I. De Falco, and A. Menciassi, “A Soft Modular Manipulator for Minimally Invasive Surgery: Design and Characterization of a Single Module,” IEEE Trans. Robot., vol. 32, no. 1, pp. 187–200, 2016, doi: 10.1109/TRO.2015.2507160. DOI: https://doi.org/10.1109/TRO.2015.2507160
K. M. de Payrebrune and O. M. O’Reilly, “On constitutive relations for a rod- based model of a pneu-net bending actuator,” Extrem. Mech. Lett., vol. 8, pp. 38–46, Sep. 2016, doi: 10.1016/J.EML.2016.02.007.
Z. Wang, R. Kanegae, S. Hirai, and W. E. T. Al, “Circular Shell Gripper for Handling Food Products,” vol. 00, no. 00, pp. 1–13, 2020, doi: 10.1089/ soro.2019.0140.
L. Marechal, P. Balland, L. Lindenroth, F. Petrou, C. Kontovounisios, and F. Bello, “Toward a Common Framework and Database of Materials for Soft Robotics,” Soft Robot., vol. 00, no. 00, 2020, doi: 10.1089/soro.2019.0115. DOI: https://doi.org/10.1089/soro.2019.0115
M. Manns, J. Morales, and P. Frohn, “Additive manufacturing of silicon based PneuNets as soft robotic actuators,” 2018, doi: 10.1016/j.procir.2018.03.186. DOI: https://doi.org/10.1016/j.procir.2018.03.186
F. Schreiber, M. Manns, and J. Morales, “Design of an additively manufactured soft ring-gripper,” Procedia Manuf., vol. 28, pp. 142–147, Jan. 2019, doi: 10.1016/J.PROMFG.2018.12.023. DOI: https://doi.org/10.1016/j.promfg.2018.12.023
S. Rosset, O. A. Araromi, S. Schlatter, and H. R. Shea, “Fabrication Process of Silicone-based Dielectric Elastomer Actuators,” J. Vis. Exp., no. 108, pp. 1–13, 2016, doi: 10.3791/53423. DOI: https://doi.org/10.3791/53423
P. Abbasi, M. A. Nekoui, M. Zareinejad, P. Abbasi, and Z. Azhang, “Position and Force Control of a Soft Pneumatic Actuator,” Soft Robot., vol. 00, no. 00, pp. 1–14, 2020, doi: 10.1089/soro.2019.0065. DOI: https://doi.org/10.1089/soro.2019.0065
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, vol. 521, no. 7553, pp. 467–475, 2015, doi: 10.1038/nature14543. DOI: https://doi.org/10.1038/nature14543
A. Raatz, S. Blankemeyer, G. Runge, C. Bruns, and G. Borchert, “Opportunities and Challenges for the Design of Inherently Safe Robots,” in Soft Robotics: Transferring Theory to Application, A. Verl, A. Albu-Schäffer, O. Brock, and A. Raatz, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2015, pp. 173–183. DOI: https://doi.org/10.1007/978-3-662-44506-8_15
P. Polygerinos et al., “Towards a soft pneumatic glove for hand rehabilitation,” IEEE Int. Conf. Intell. Robot. Syst., pp. 1512–1517, 2013, doi: 10.1109/ IROS.2013.6696549. DOI: https://doi.org/10.1109/IROS.2013.6696549
B. Mosadegh et al., “Pneumatic networks for soft robotics that actuate rapidly,” Adv. Funct. Mater., vol. 24, no. 15, pp. 2163–2170, 2014, doi: 10.1002/adfm.201303288. DOI: https://doi.org/10.1002/adfm.201303288
J. A. Lenssen, H. Naghibi, and M. Abayazid, “Evaluation of design aspects of modular pneumatic soft robotic endoscopes,” RoboSoft 2019 - 2019 IEEE Int. Conf. Soft Robot., pp. 56–61, 2019, doi: 10.1109/ ROBOSOFT.2019.8722749. DOI: https://doi.org/10.1109/ROBOSOFT.2019.8722749
J. Z. Gul et al., “3D printing for soft robotics–a review,” Sci. Technol. Adv. Mater., vol. 19, no. 1, pp. 243–262, 2018, doi: 10.1080/14686996.2018.143 1862.
M. Pérez, D. Carou, E. M. Rubio, and R. Teti, “Current advances in additive manufacturing,” Procedia CIRP, vol. 88, pp. 439–444, 2020, doi: 10.1016/ j.procir.2020.05.076. DOI: https://doi.org/10.1016/j.procir.2020.05.076
T. B. Tuli and M. Manns, “Hierarchical motion control for real time simulation of industrial robots,” in CIRP Manufacturing Systems Conference 2019, 2019, vol. 00. DOI: https://doi.org/10.1016/j.procir.2019.03.181
K. W. A.B. Spierings, M. Voegtlin, T. Bauer, “Materials Testing Standards for Additive Manufacturing of Polymer Materials :,” Prog Addit Manuf, vol. 1, pp. 9–20, 2015, doi: http://dx.doi.org/10.6028/NIST.IR.8059. DOI: https://doi.org/10.1007/s40964-015-0001-4
H.-T. Lin et al., “Softworms: the design and control of non- pneumatic, 3D- printed, deformable robots Recent citations Softworms: the design and control of non-pneumatic, 3D-printed, deformable robots,” Bioinspir. Biomim, vol. 11, 2016, doi: 10.1088/1748-3190/11/2/025001. DOI: https://doi.org/10.1088/1748-3190/11/2/025001
D. M. App, “Motion Terminal VTEM,” pp. 1–36, 2019.
K. M. de Payrebrune and O. M. O’Reilly, “On constitutive relations for a rod-based model of a pneu-net bending actuator,” Extrem. Mech. Lett., vol. 8, no. 10, pp. 38–46, 2016, doi: 10.1016/j.eml.2016.02.007. DOI: https://doi.org/10.1016/j.eml.2016.02.007
S. Ibrahim, J. C. Krause, and A. Raatz, “Linear and nonlinear low level control of a soft pneumatic actuator,” RoboSoft 2019 - 2019 IEEE Int. Conf. Soft Robot., vol. V, pp. 434–440, 2019, doi: 10.1109/ROBOSOFT.2019.8722737. DOI: https://doi.org/10.1109/ROBOSOFT.2019.8722737
Z. Gong et al., “An opposite-bending-and-extension soft robotic manipulator for delicate grasping in shallow water,” Front. Robot. AI, vol. 6, no. APR, pp. 1–10, 2019, doi: 10.3389/frobt.2019.00026. DOI: https://doi.org/10.3389/frobt.2019.00026